//==================================================
// BATTLESHIP MAIN
//==================================================
#include "Battleship_main.h"
using namespace std;
GameBoard playerBoard;
// the color of the boid
char color = WHITE;
// Boid on core 0
fix15 cursorpos_x;
fix15 cursorpos_y;
fix15 cursorpos_cx;
fix15 cursorpos_cy;
// Boid on core 1
fix15 cursorpos_prev_x = 0;
fix15 cursorpos_prev_y = 0;
// =================== declare DMA chains =========
int data_chan_boom;
int ctrl_chan_boom;
int data_chan_splash;
int ctrl_chan_splash;
// =========================== JOYSTICK - CURSOR =================
void spawnCursor(fix15 *x, fix15 *y, fix15 *vx, fix15 *vy)
{
*x = int2fix15(77);
*y = int2fix15(79);
*vx = int2fix15(0);
*vy = int2fix15(0);
}
void checkPOS(fix15 *x, fix15 *y, fix15 *vx, fix15 *vy)
{
if (gpio_get(JOY_RIGHT) == 0)
{
*vx = int2fix15(-STRIDE_LENGTH);
*vy = int2fix15(0);
}
else if (gpio_get(JOY_LEFT) == 0)
{
*vx = int2fix15(STRIDE_LENGTH);
*vy = int2fix15(0);
}
else if (gpio_get(JOY_UP) == 0)
{
*vx = int2fix15(0);
*vy = int2fix15(STRIDE_LENGTH);
}
else if (gpio_get(JOY_DOWN) == 0)
{
*vx = int2fix15(0);
*vy = int2fix15(-STRIDE_LENGTH);
}
else
{
*vx = int2fix15(0);
*vy = int2fix15(0);
}
*x = *x + *vx;
*y = *y + *vy;
sleep_ms(200);
}
void wrapCursor(fix15 *x_pos, fix15 *y_pos)
{
// Wrap around horizontally
if (*x_pos > int2fix15(SCREEN_WIDTH))
{
*x_pos = int2fix15(0);
}
else if (*x_pos < int2fix15(0))
{
*x_pos = int2fix15(SCREEN_WIDTH);
}
// Wrap around vertically
if (*y_pos > int2fix15(SCREEN_HEIGHT))
{
*y_pos = int2fix15(0);
}
else if (*y_pos < int2fix15(0))
{
*y_pos = int2fix15(SCREEN_HEIGHT);
}
}
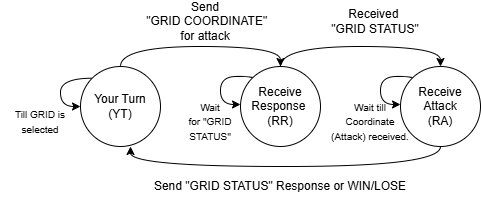
void drawTextforGameState(PlayerState my_state_1)
{
setTextColor(BLUE);
setTextSize(2);
static char status[50];
// Display my state
fillRect(START_GAME_X - 1, START_GAME_Y - 3, 120, 20, BLACK);
setCursor(START_GAME_X, START_GAME_Y);
switch (my_state_1)
{
case YT:
sprintf(status, "YOUR TURN");
break;
case RR:
sprintf(status, "WAITING RESPONSE");
break;
case RA:
sprintf(status, "WAITING FOR ATTACK");
break;
}
writeString(status);
}
Coordinate8 isInMYGRID(int x_pos, int y_pos)
{
Coordinate8 coord;
int grid_end_x = LEFT_GRID_X + 10 * GRID_SQUARE_SIZE;
int grid_end_y = LEFT_GRID_Y + 10 * GRID_SQUARE_SIZE;
if (x_pos >= LEFT_GRID_X && x_pos < grid_end_x &&
y_pos >= LEFT_GRID_Y && y_pos < grid_end_y)
{
coord.x = (x_pos - LEFT_GRID_X) / GRID_SQUARE_SIZE;
coord.y = (y_pos - LEFT_GRID_Y) / GRID_SQUARE_SIZE;
}
else
{
coord.x = 30;
coord.y = 30;
}
return coord;
}
Coordinate8 isInOtherGRID(int x_pos, int y_pos)
{
Coordinate8 coord;
int grid_end_x = RIGHT_GRID_X + 10 * GRID_SQUARE_SIZE;
int grid_end_y = RIGHT_GRID_Y + 10 * GRID_SQUARE_SIZE;
if (x_pos >= RIGHT_GRID_X && x_pos < grid_end_x &&
y_pos >= RIGHT_GRID_Y && y_pos < grid_end_y)
{
// coord.x = (x_pos - RIGHT_GRID_X) / GRID_SQUARE_SIZE; //Chengle's version
coord.x = (x_pos - RIGHT_GRID_X) / GRID_SQUARE_SIZE - 26; // diksh's version
coord.y = (y_pos - RIGHT_GRID_Y) / GRID_SQUARE_SIZE;
}
else
{
coord.x = 30;
coord.y = 30;
}
return coord;
}
//=========================== IRQ - Button ===================
volatile bool prev_yellow_button_state = false;
volatile bool prev_red_button_state = false;
volatile bool yellow_button_state = false; // new variable with similar name!!!!
volatile bool red_button_state = false;
volatile bool yellow_pressed = false; // button change from 0 to 1 --> pressed = 1
volatile bool red_pressed = false;
uint16_t DAC_data_0;
int sound_count = 0;
bool sound_flag = true;
static void sound_irq(void)
{
gpio_put(SOUND_ISR_GPIO, 1);
// Clear the alarm irq
hw_clear_bits(&timer_hw->intr, 1u << SOUND_ALARM_NUM);
// Reset the alarm register
timer_hw->alarm[SOUND_ALARM_NUM] = timer_hw->timerawl + SOUND_DELAY;
if(sound_flag){
DAC_data_0 = DAC_config_chan_A | (splash_audio[sound_count] & 0x0FFF);
spi_write16_blocking(SPI_PORT, &DAC_data_0, 1) ;
sound_count ++;
if(sound_count > splash_audio_len){
sound_count = 0;
sound_flag = false;
}
}
gpio_put(SOUND_ISR_GPIO, 0);
}
static void button_irq(void)
{
// Assert a GPIO when we enter the interrupt
gpio_put(ISR_GPIO, 1);
// Clear the alarm irq
hw_clear_bits(&timer_hw->intr, 1u << ALARM_NUM);
// Reset the alarm register
timer_hw->alarm[ALARM_NUM] = timer_hw->timerawl + DELAY;
// ------ MAIN FUNCTION HERE ----------
// update previous state
prev_yellow_button_state = yellow_button_state;
prev_red_button_state = red_button_state;
// set current state
yellow_button_state = gpio_get(BUT_PIN_Y);
red_button_state = gpio_get(BUT_PIN_R);
// by default, we assume no button change from 0 to 1
yellow_pressed = false;
red_pressed = false;
// onlt 0->1 is press
if (prev_yellow_button_state != yellow_button_state)
{
// printf("Yellow: from %b to %b", yellow_button_state, y_state);
if (yellow_button_state == 1)
{
yellow_pressed = true;
printf("\nyellow pressed");
}
}
if (prev_red_button_state != red_button_state)
{
// printf("Red: from %b to %b", red_button_state, r_state);
if (red_button_state == 1)
{
red_pressed = true;
printf("\nred pressed");
}
}
// ------------------------------------
// De-assert the GPIO when we leave the interrupt
gpio_put(ISR_GPIO, 0);
}
// ==================================================
// === Animation Thread
// ==================================================
int intcursor_x;
int intcursor_y;
static PT_THREAD(protothread_anim(struct pt *pt))
{
// Mark beginning of thread
PT_BEGIN(pt);
static int begin_time;
static int spare_time;
static char buffer1[50];
// spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy); // Spawn a boid at (20,20,0,0)
// moveCursor(&cursorpos_prev_x, &cursorpos_prev_y, cursorpos_x, cursorpos_y, color);
uint8_t prev_val = 0;
uint8_t val_ship = 0;
bool select_flag = false;
uint8_t ctr_ship = 0;
int ctr_button = 0;
// static bool prev_left_button_state = false;
// bool curr_left_button_state = false;
// static bool prev_right_button_state = false;
// bool curr_right_button_state = false;
// PT_SEM_SAFE_WAIT(pt, &new_message);
while (1)
{
// Measure time at start of thread
begin_time = time_us_32();
// Each Page Working
if (playerBoard.game_status == GAME_STATUS::INITIAL)
{
if (yellow_pressed)
{
welcomeText(BLACK);
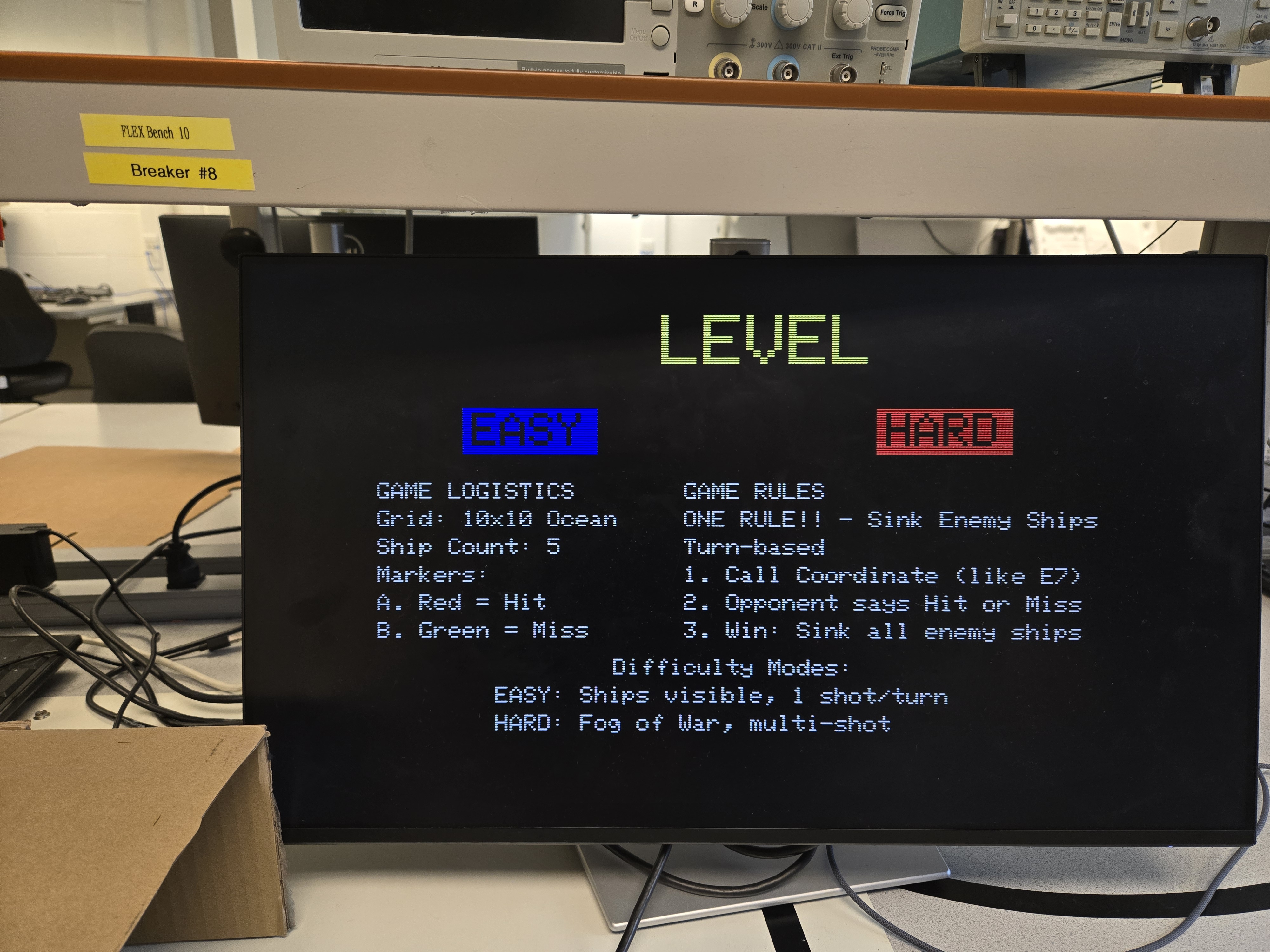
playerBoard.game_status = GAME_STATUS::LEVEL;
raw_send(GAME_STATUS::LEVEL, GRID_STATE::WATER, {(uint8_t)intcursor_x, (uint8_t)intcursor_y}, 1);
difficultyChoose(YELLOW, RED, 0, 1);
printf("\nGAME_STATUS: %d", playerBoard.game_status_check());
yellow_pressed = false; // avoid skip difficulty level
}
}
else if (playerBoard.game_status == GAME_STATUS::LEVEL)
{
// "Easy" == Yellow button
if (yellow_pressed)
{
difficultyChoose(YELLOW, BLUE, 0, 0);
playerBoard.game_status = GAME_STATUS::PLACE;
fillRect(0,0,320,240,BLACK);
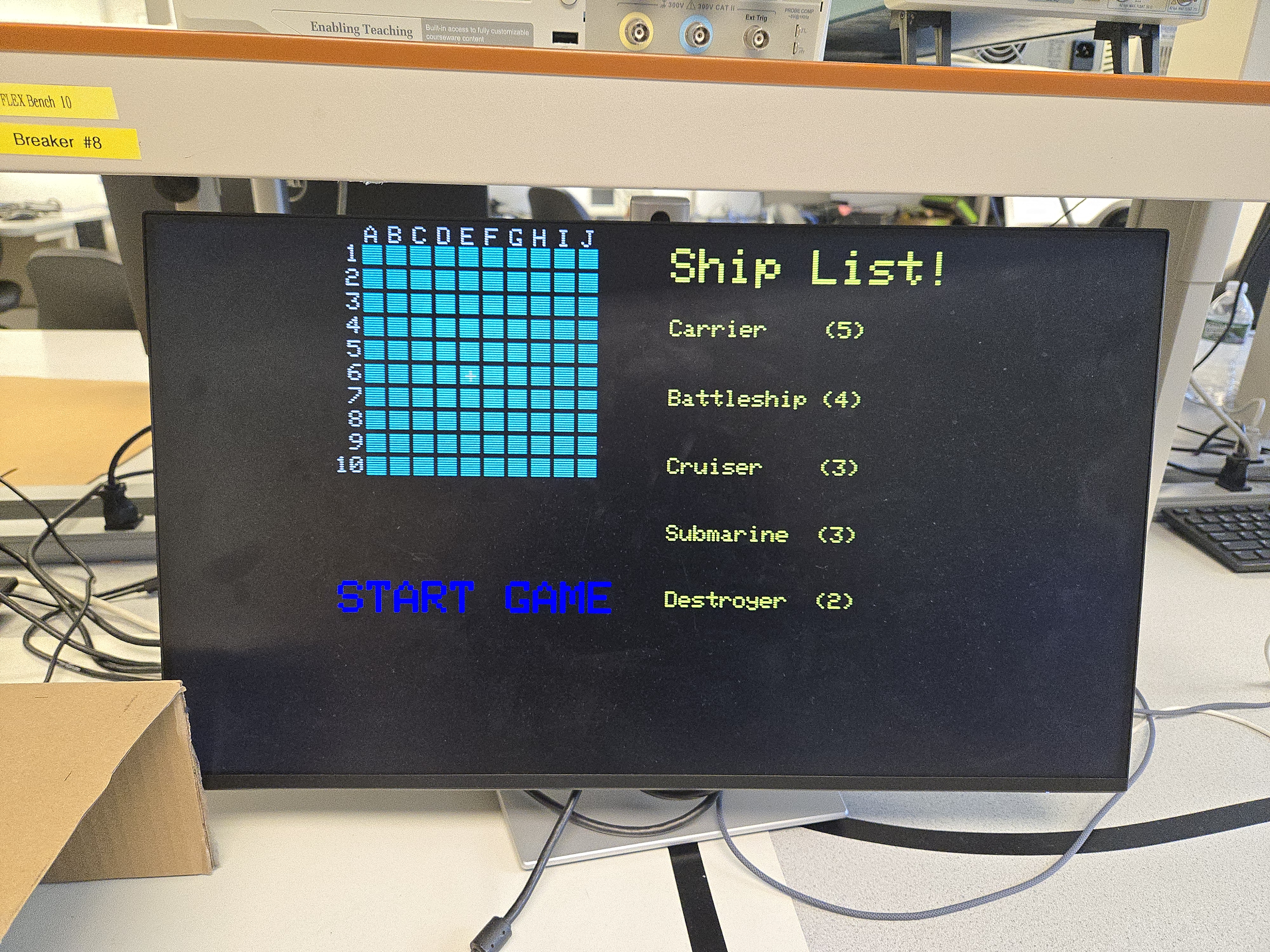
drawGRID(BOARD_SIZE, LEFT_GRID_X, LEFT_GRID_Y, GRID_OUTLINE, BLUE);
drawGridDim(LEFT_GRID_X, LEFT_GRID_Y, WHITE);
drawTextforShip(YELLOW, BLUE, 1);
printf("\nGAME_STATUS: %d", playerBoard.game_status_check());
spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy); // Spawn a boid
// drawCursor(fix2int15(cursorpos_x), fix2int15(cursorpos_y), color);
moveCursor(&cursorpos_prev_x, &cursorpos_prev_y, cursorpos_x, cursorpos_y, color);
yellow_pressed = false;
}
//"Hard" == Red button
if (red_pressed)
{
difficultyChoose(YELLOW, BLUE, 0, 0);
playerBoard.game_status = GAME_STATUS::PLACE;
fillRect(0,0,320,240,BLACK);
drawGRID(BOARD_SIZE, LEFT_GRID_X, LEFT_GRID_Y, GRID_OUTLINE, BLUE);
drawGridDim(LEFT_GRID_X, LEFT_GRID_Y, WHITE);
drawTextforShip(YELLOW, BLUE, 1);
printf("\nGAME_STATUS: %d", playerBoard.game_status_check());
spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy); // Spawn a boid
// drawCursor(fix2int15(cursorpos_x), fix2int15(cursorpos_y), color);
moveCursor(&cursorpos_prev_x, &cursorpos_prev_y, cursorpos_x, cursorpos_y, color);
red_pressed = false;
}
}
else if (playerBoard.game_status == GAME_STATUS::PLACE)
{
checkPOS(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy);
wrapCursor(&cursorpos_x, &cursorpos_y);
if (cursorpos_prev_x != cursorpos_x | cursorpos_prev_y != cursorpos_y)
{
void drawBoundary();
printf("\nOpponentGame Status %d", opponent_player);
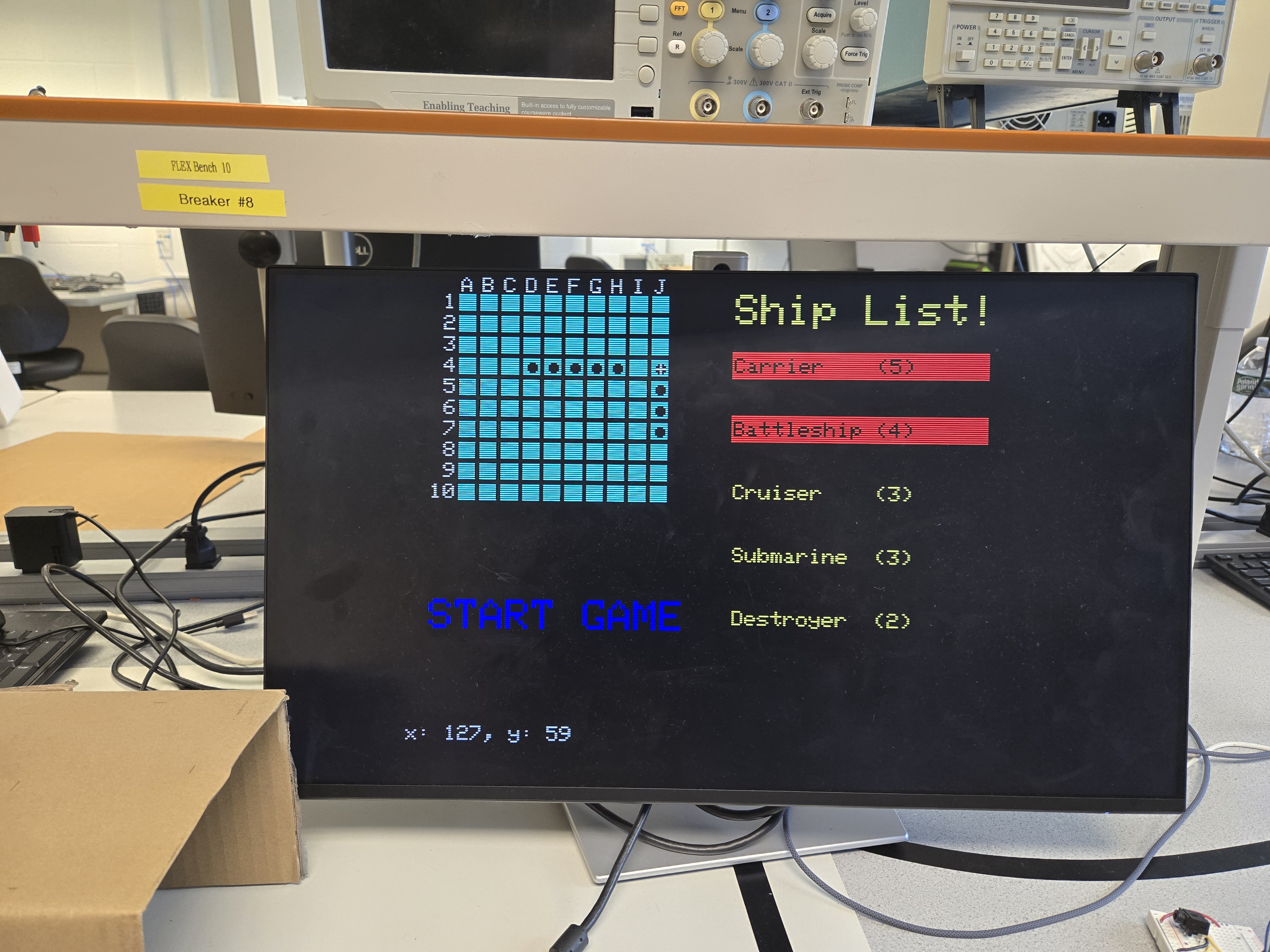
fillRect(10, SCREEN_HEIGHT - 10, 100, 10, BLACK);
sprintf(buffer1, "x: %d, y: %d", fix2int15(cursorpos_x), fix2int15(cursorpos_y));
setCursor(10, SCREEN_HEIGHT - 10);
setTextColor(WHITE);
setTextSize(1);
writeString(buffer1);
// drawCursor(fix2int15(cursorpos_prev_x), fix2int15(cursorpos_prev_y), BLACK);
// cursorpos_prev_x = cursorpos_x;
// cursorpos_prev_y = cursorpos_y;
moveCursor(&cursorpos_prev_x, &cursorpos_prev_y, cursorpos_x, cursorpos_y, color);
}
intcursor_x = fix2int15(cursorpos_x);
intcursor_y = fix2int15(cursorpos_y);
const char *shipname;
if (ctr_ship != 5)
{
if (select_flag == false)
{
val_ship = checkCursorOverShip(intcursor_x, intcursor_y);
// printf("val_ship = %d\n", val_ship);
// printf("prev_val = %d\n", prev_val);
if (val_ship != 0 && prev_val != val_ship && yellow_button_state && prev_yellow_button_state)
{
printf("pass through\n");
if (val_ship == 1)
{
shipname = "Carrier (5)";
drawBoxforShip(RED, RIGHT_GRID_X, SHIPLIST_SPACE_Carrier, shipname);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
prev_val = val_ship;
select_flag = true;
// spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy);
}
else if (val_ship == 2)
{
printf("select batteship");
shipname = "Battleship (4)";
drawBoxforShip(RED, RIGHT_GRID_X, SHIPLIST_SPACE_Battleship, shipname);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
prev_val = val_ship;
select_flag = true;
// spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy);
}
else if (val_ship == 3)
{
shipname = "Cruiser (3)";
drawBoxforShip(RED, RIGHT_GRID_X, SHIPLIST_SPACE_Cruiser, shipname);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
prev_val = val_ship;
select_flag = true;
// spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy);
}
else if (val_ship == 4)
{
shipname = "Submarine (3)";
drawBoxforShip(RED, RIGHT_GRID_X, SHIPLIST_SPACE_Submarine, shipname);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
prev_val = val_ship;
select_flag = true;
// spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy);
}
else if (val_ship == 5)
{
shipname = "Destroyer (2)";
drawBoxforShip(RED, RIGHT_GRID_X, SHIPLIST_SPACE_Destroyer, shipname);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
prev_val = val_ship;
select_flag = true;
// spawnCursor(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy);
}
}
}
else if (select_flag)
{
if (val_ship != 0)
{
Coordinate8 grid_pos = isInMYGRID(intcursor_x, intcursor_y);
// printf("prev:%x, curr:%x", prev_right_button_state, curr_right_button_state);
// Check if we're within the grid (i.e., not the sentinel value 30,30)
if (yellow_button_state && prev_yellow_button_state && !(grid_pos.x == 30 && grid_pos.y == 30))
{
char encoded[4]; // Enough space for something like "A10" + null terminator
encodeCoord(grid_pos, encoded);
printf("\nEncoded:%c %c, VAL_SHIP:%d", encoded[0], encoded[1], val_ship - 1);
bool success = playerBoard.place_ship(SHIP_TYPE(val_ship - 1), SHIP_ORIENTATION::HORIZONTAL, grid_pos);
if (success)
{
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
ctr_ship++; // Increase placed ship counter
select_flag = false; // Reset flag to allow next ship to be selected
printf("Ship placed successfully at %d,%d\n", grid_pos.x, grid_pos.y);
}
else
printf("Invalid position. Try again.\n");
}
// Check if we're within the grid (i.e., not the sentinel value 30,30)
else if (red_button_state && prev_red_button_state && !(grid_pos.x == 30 && grid_pos.y == 30))
{
char encoded[4]; // Enough space for something like "A10" + null terminator
encodeCoord(grid_pos, encoded);
printf("\nEncoded:%c %c, VAL_SHIP:%d", encoded[0], encoded[1], val_ship - 1);
bool success = playerBoard.place_ship(SHIP_TYPE(val_ship - 1), SHIP_ORIENTATION::VERTICAL, grid_pos);
if (success)
{
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
ctr_ship++; // Increase placed ship counter
select_flag = false; // Reset flag to allow next ship to be selected
printf("Ship placed successfully at %d,%d\n", grid_pos.x, grid_pos.y);
}
else
printf("Invalid position. Try again.\n");
}
}
}
}
else
{
// printf("\nReached here finish placement");
if (checkCursorOverStartGame(intcursor_x, intcursor_y) && yellow_button_state && prev_yellow_button_state)
{
playerBoard.game_status = GAME_STATUS::ONGOING;
raw_send(GAME_STATUS::ONGOING, GRID_STATE::WATER, {(uint8_t)intcursor_x, (uint8_t)intcursor_y}, 1);
printf("\nGAME_STATUS: %d", playerBoard.game_status_check());
drawTextforShip(BLACK, BLACK, 1);
drawBoxforStartGame(BLACK);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
drawBlackBoxforShip();
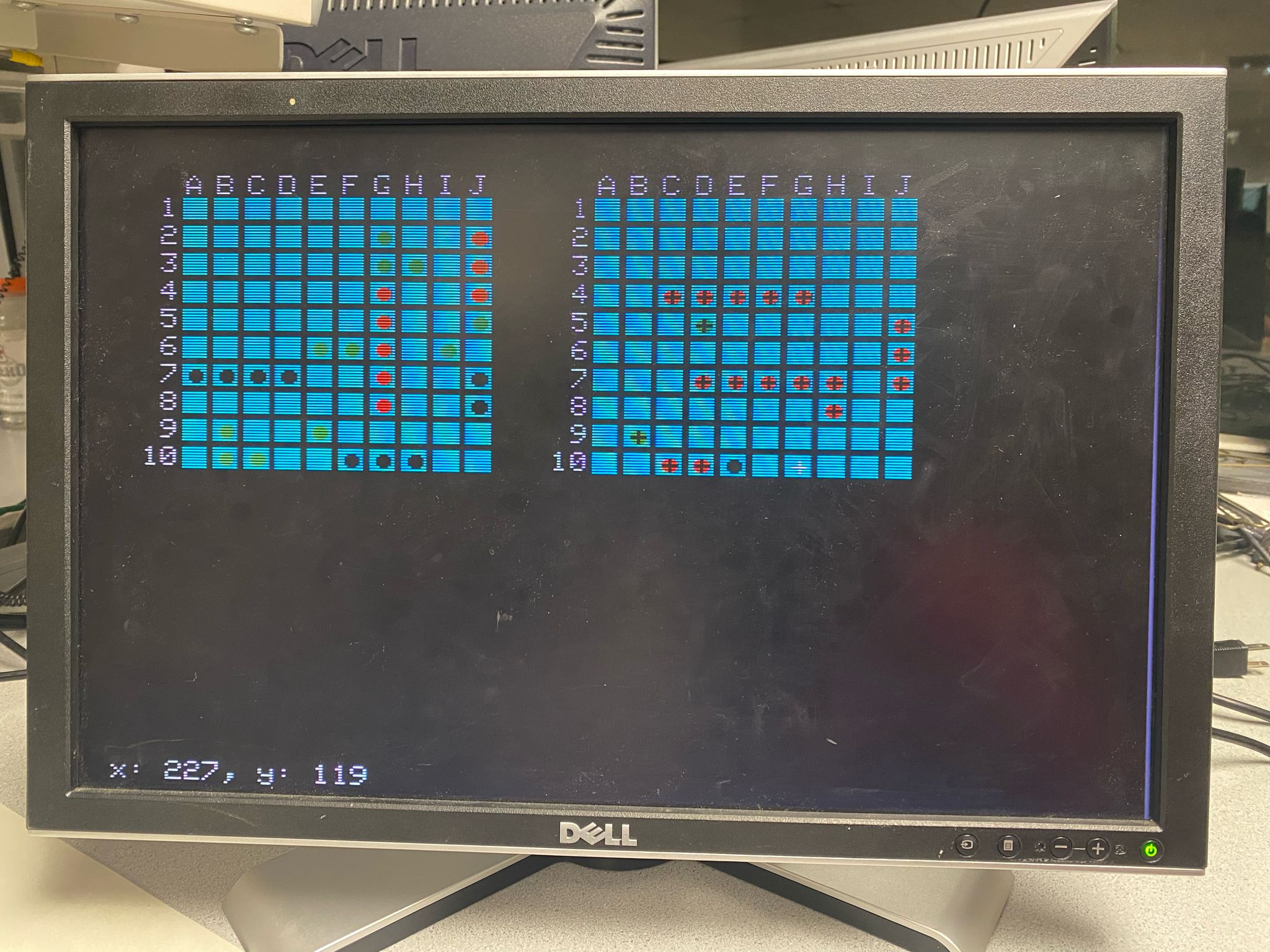
drawGRID(BOARD_SIZE, RIGHT_GRID_X, RIGHT_GRID_Y, GRID_OUTLINE, BLUE);
drawGridDim(RIGHT_GRID_X, RIGHT_GRID_Y, WHITE);
}
}
}
else if (playerBoard.game_status == GAME_STATUS::ONGOING)
{
// ------------- Check Cursor Movement --------------
checkPOS(&cursorpos_x, &cursorpos_y, &cursorpos_cx, &cursorpos_cy); // update cursor loctaion
wrapCursor(&cursorpos_x, &cursorpos_y); // avoid go out of boundary
if (cursorpos_prev_x != cursorpos_x | cursorpos_prev_y != cursorpos_y)
{
drawTextforGameState(my_state);
// void drawBoundary();
printf("\nOpponentGame Status %d", opponent_player);
fillRect(10, SCREEN_HEIGHT - 10, 100, 10, BLACK);
sprintf(buffer1, "x: %d, y: %d", fix2int15(cursorpos_x), fix2int15(cursorpos_y));
setCursor(10, SCREEN_HEIGHT - 10);
setTextColor(WHITE);
setTextSize(1);
writeString(buffer1);
moveCursor(&cursorpos_prev_x, &cursorpos_prev_y, cursorpos_x, cursorpos_y, color);
} // End if cursor moved
intcursor_x = fix2int15(cursorpos_x);
intcursor_y = fix2int15(cursorpos_y);
// printf("\nOpponentGame Status %d", opponent_player);
// printf("\nMY_STATE%x", my_state);
Coordinate8 posn;
posn.x = uint8_t(intcursor_x);
posn.y = uint8_t(intcursor_y);
if (opponent_player == GAME_STATUS::ONGOING)
{
Coordinate8 grid_pos = isInOtherGRID(intcursor_x, intcursor_y);
// PRINT HERE TURN RESULT ALSO
if (my_state == YT)
{
if (!(grid_pos.x == 30 && grid_pos.y == 30) && prev_yellow_button_state && yellow_button_state)
{
drawPegPotentialShip(grid_pos.x, grid_pos.y);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
printf("\nEntered send attack segment");
raw_send(GAME_STATUS::ONGOING, GRID_STATE::REPEAT, grid_pos, 3);
my_state = RR;
opponent_state = RA;
}
}
else if (my_state == RR && strstr(received_data, "GRID") != NULL)
{
if (opponent_gridstate == GRID_STATE::HIT)
{
dma_start_channel_mask(1u << ctrl_chan_boom);
drawPegHitRight((int)grid_pos.x, (int)grid_pos.y);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
}
else if (opponent_gridstate == GRID_STATE::MISS)
{
// dma_start_channel_mask(1u << ctrl_chan_splash);
sound_flag = true;
drawPegMissRight((int)grid_pos.x, (int)grid_pos.y);
moveCursor(&cursorpos_x, &cursorpos_y, cursorpos_x, cursorpos_y, color);
}
my_state = RA;
opponent_state = YT;
}
else if (my_state == RA)
{
int length_string = strlen(received_data);
if (length_string <= 18 && length_string > 16)
{
GRID_STATE my_GRID = playerBoard.attack(our_shippos);
if (playerBoard.all_ships_sunk())
{
raw_send(GAME_STATUS::WIN, GRID_STATE::HIT, posn, 1);
playerBoard.game_status = GAME_STATUS::LOSE;
}
else
{
raw_send(GAME_STATUS::ONGOING, my_GRID, posn, 2);
my_state = YT;
opponent_state = RA;
}
}
}
}
else if (opponent_player == GAME_STATUS::LOSE)
{
playerBoard.game_status = GAME_STATUS::WIN;
fillRect(0, 0, 320, 240, BLACK);
winnerDeclare(YELLOW);
break;
}
else
{
raw_send(GAME_STATUS::ONGOING, GRID_STATE::WATER, posn, 1);
}
}
else if (playerBoard.game_status == GAME_STATUS::LOSE)
{
raw_send(GAME_STATUS::LOSE, GRID_STATE::HIT, {30, 30}, 1);
fillRect(0, 0, 320, 240, BLACK);
loserDeclare(WHITE);
break;
}
spare_time = FRAME_RATE - (time_us_32() - begin_time);
} // END WHILE(1)
PT_END(pt);
} // animation thread
// ==================================================
// === CORE 1 MAIN
// ==================================================
void core1_main()
{
initVGA();
welcomeText(YELLOW);
// raw_send_test();
pt_add_thread(protothread_anim);
// pt_add_thread(protothread_serial);
pt_schedule_start;
}
// ========================================
// === main
// ========================================
int main()
{
stdio_init_all();
printf("Start main\n");
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
// initialize button
gpio_init(BUT_PIN_Y);
gpio_set_dir(BUT_PIN_Y, GPIO_IN);
gpio_pull_up(BUT_PIN_Y);
gpio_init(BUT_PIN_R);
gpio_set_dir(BUT_PIN_R, GPIO_IN);
gpio_pull_up(BUT_PIN_R);
// initialize Joystick
// set up gpio 4 for joystick button
gpio_init(JOY_RIGHT); // right
gpio_init(JOY_LEFT); // left
gpio_init(JOY_UP); // up
gpio_init(JOY_DOWN); // down
gpio_set_dir(JOY_RIGHT, GPIO_IN);
gpio_set_dir(JOY_LEFT, GPIO_IN);
gpio_set_dir(JOY_UP, GPIO_IN);
gpio_set_dir(JOY_DOWN, GPIO_IN);
// pullup ON, pulldown OFF
gpio_pull_up(JOY_RIGHT);
gpio_pull_up(JOY_LEFT);
gpio_pull_up(JOY_UP);
gpio_pull_up(JOY_DOWN);
// Setup the ISR-timing GPIO
gpio_init(ISR_GPIO);
gpio_set_dir(ISR_GPIO, GPIO_OUT);
gpio_put(ISR_GPIO, 0);
// Enable the interrupt for the alarm (we're using Alarm 0)
hw_set_bits(&timer_hw->inte, 1u << ALARM_NUM);
// Associate an interrupt handler with the ALARM_IRQ
irq_set_exclusive_handler(ALARM_IRQ, button_irq);
// Enable the alarm interrupt
irq_set_enabled(ALARM_IRQ, true);
// Write the lower 32 bits of the target time to the alarm register, arming it.
timer_hw->alarm[ALARM_NUM] = timer_hw->timerawl + DELAY;
// playerBoard.game_status = GAME_STATUS::PLACE;
printf("\nGAME_STATUS: %d", playerBoard.game_status_check());
memset(received_data, 0, BEACON_MSG_LEN_MAX); // clean received_data content (remove garbge)
// Connect to WiFi
if (connectWifi(country, WIFI_SSID, WIFI_PASSWORD, auth))
{
printf("Failed connection.\n");
}
else
{
printf("My IP is: %s\n", ip4addr_ntoa(netif_ip_addr4(netif_default)));
}
// Initialize semaphore
PT_SEM_INIT(&new_message, 0);
PT_SEM_INIT(&ready_to_send, 0);
//============================
// UDP recenve ISR routines
udpecho_raw_init();
// Initialize SPI channel (channel, baud rate set to 20MHz)
spi_init(SPI_PORT, 20000000);
// Format SPI channel (channel, data bits per transfer, polarity, phase, order)
spi_set_format(SPI_PORT, 16, SPI_CPOL_0, SPI_CPHA_0, SPI_LSB_FIRST);
// Map SPI signals to GPIO ports, acts like framed SPI with this CS mapping
gpio_set_function(PIN_MISO, GPIO_FUNC_SPI);
gpio_set_function(PIN_CS, GPIO_FUNC_SPI);
gpio_set_function(PIN_SCK, GPIO_FUNC_SPI);
gpio_set_function(PIN_MOSI, GPIO_FUNC_SPI);
// Build sine table and DAC data table
int i;
for (i = 0; i < (sine_table_size); i++)
{
raw_sin[i] = (int)(2047 * sin((float)i * 6.283 / (float)sine_table_size) + 2047); // 12 bit
DAC_data[i] = DAC_config_chan_A | (raw_sin[i] & 0x0fff);
}
int k;
for (k = 0; k < splash_audio_len; k++)
{
splash_data[k] = DAC_config_chan_A | (splash_audio[k] & 0x0FFF); // first convert to 12 bit then add config
}
int j;
for (j = 0; j < boom_audio_len; j++)
{
boom_data[j] = DAC_config_chan_A | (boom_audio[j] & 0x0FFF); // first convert to 12 bit then add config
}
// ============================== IRQ SOUND ===========================
// // SOUND----------------------Setup the ISR-timing GPIO
gpio_init(SOUND_ISR_GPIO);
gpio_set_dir(SOUND_ISR_GPIO, GPIO_OUT);
gpio_put(SOUND_ISR_GPIO, 0);
// Enable the interrupt for the alarm (we're using Alarm 0)
hw_set_bits(&timer_hw->inte, 1u << SOUND_ALARM_NUM);
// Associate an interrupt handler with the ALARM_IRQ
irq_set_exclusive_handler(SOUND_ALARM_IRQ, sound_irq);
// Enable the alarm interrupt
irq_set_enabled(SOUND_ALARM_IRQ, true);
// Write the lower 32 bits of the target time to the alarm register, arming it.
timer_hw->alarm[SOUND_ALARM_NUM] = timer_hw->timerawl + SOUND_DELAY;
// ==================================================
// SPLASH
// Select DMA channels
data_chan_splash = dma_claim_unused_channel(true);
;
ctrl_chan_splash = dma_claim_unused_channel(true);
;
// Setup the control channel
dma_channel_config c8 = dma_channel_get_default_config(ctrl_chan_splash); // default configs
channel_config_set_transfer_data_size(&c8, DMA_SIZE_32); // 32-bit txfers
channel_config_set_read_increment(&c8, false); // no read incrementing
channel_config_set_write_increment(&c8, false); // no write incrementing
channel_config_set_chain_to(&c8, data_chan_splash); // chain to data channel
dma_channel_configure(
ctrl_chan_splash, // Channel to be configured
&c8, // The configuration we just created
&dma_hw->ch[data_chan_splash].read_addr, // Write address (data channel read address)
&splash_pointer, // Read address (POINTER TO AN ADDRESS)
1, // Number of transfers
false // Don't start immediately
);
// Setup the data channel
dma_channel_config c9 = dma_channel_get_default_config(data_chan_splash); // Default configs
channel_config_set_transfer_data_size(&c9, DMA_SIZE_16); // 16-bit txfers
channel_config_set_read_increment(&c9, true); // yes read incrementing
channel_config_set_write_increment(&c9, false); // no write incrementing
// (X/Y)*sys_clk, where X is the first 16 bytes and Y is the second
// sys_clk is 125 MHz unless changed in code. Configured to ~44 kHz
// dma_timer_set_fraction(0, 0x0017, 0xffff);
dma_timer_set_fraction(1, 0x005, 0XDf00); // ~11025Hz
// dma_timer_set_fraction(1, 0x005, 0XDf00); // 16kHz
// 0x3b means timer0 (see SDK manual)
channel_config_set_dreq(&c9,0x3d);// 0x3d); // DREQ paced by timer 1
// chain to the controller DMA channel
// channel_config_set_chain_to(&c9, ctrl_chan_splash); // Chain to control channel
dma_channel_configure(
data_chan_splash, // Channel to be configured
&c9, // The configuration we just created
&spi_get_hw(SPI_PORT)->dr, // write address (SPI data register)
splash_data, // The initial read address
splash_audio_len, // Number of transfers
false // Don't start immediately.
);
// BOOM
// Select DMA channels
data_chan_boom = dma_claim_unused_channel(true);
;
ctrl_chan_boom = dma_claim_unused_channel(true);
;
// Setup the control channel
dma_channel_config c6 = dma_channel_get_default_config(ctrl_chan_boom); // default configs
channel_config_set_transfer_data_size(&c6, DMA_SIZE_32); // 32-bit txfers
channel_config_set_read_increment(&c6, false); // no read incrementing
channel_config_set_write_increment(&c6, false); // no write incrementing
channel_config_set_chain_to(&c6, data_chan_boom); // chain to data channel
dma_channel_configure(
ctrl_chan_boom, // Channel to be configured
&c6, // The configuration we just created
&dma_hw->ch[data_chan_boom].read_addr, // Write address (data channel read address)
&boom_pointer, // Read address (POINTER TO AN ADDRESS)
1, // Number of transfers
false // Don't start immediately
);
// Setup the data channel
dma_channel_config c7 = dma_channel_get_default_config(data_chan_boom); // Default configs
channel_config_set_transfer_data_size(&c7, DMA_SIZE_16); // 16-bit txfers
channel_config_set_read_increment(&c7, true); // yes read incrementing
channel_config_set_write_increment(&c7, false); // no write incrementing
// (X/Y)*sys_clk, where X is the first 16 bytes and Y is the second
// sys_clk is 125 MHz unless changed in code. Configured to ~44 kHz
// dma_timer_set_fraction(0, 0x0017, 0xffff);
// dma_timer_set_fraction(0, 0x005, 0XDf00); // ~11025Hz
dma_timer_set_fraction(0, 0x0008, 0xf500); // 16kHz
// 0x3b means timer0 (see SDK manual)
channel_config_set_dreq(&c7, 0x3b); // DREQ paced by timer 0
// chain to the controller DMA channel
// channel_config_set_chain_to(&c2, ctrl_chan); // Chain to control channel
dma_channel_configure(
data_chan_boom, // Channel to be configured
&c7, // The configuration we just created
&spi_get_hw(SPI_PORT)->dr, // write address (SPI data register)
boom_data, // The initial read address
boom_audio_len, // Number of transfers
false // Don't start immediately.
);
// dma_start_channel_mask(1u << ctrl_chan_splash);
multicore_reset_core1();
multicore_launch_core1(&core1_main);
// sleep_ms(100);
pt_add_thread(protothread_send);
pt_add_thread(protothread_receive);
// start scheduler
pt_schedule_start;
}