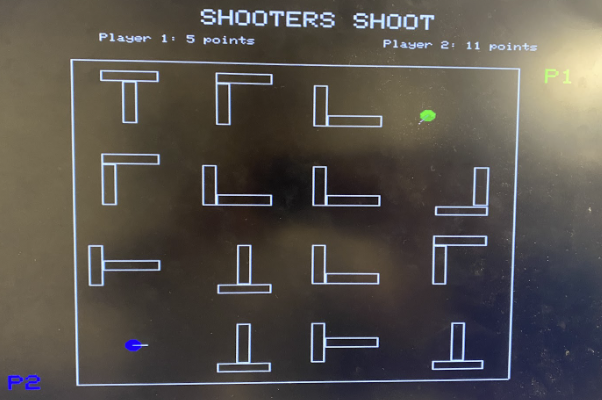
Overall, our “Shooters Shoot” implementation met and in many respects exceeded our initial expectations in terms of responsiveness and visual fluidity. Running at a consistent 40 FPS on the RP2040, the bullet trajectories exhibited smooth, frame-rate–independent motion, thanks to our collision routines which invert and correct velocity upon wall impact. In practice, we rarely observed bullets “tunneling” through walls, and corner-bounce anomalies occurred only under contrived edge‐case conditions—underscoring the robustness of our per-frame step size and collision‐detection trade-off. Players noted that the bouncing dynamics felt natural and engaging, aligning closely with the arcade‐style aesthetic we aimed for.
One of our ambitious goals was to render arbitrarily rotated rectangular tanks via true vector drawing. We prototyped a drawTiltedLine helper to draw each edge of the rectangle at any angle, but time constraints and the VGA module’s low pixel density introduced visible gaps between line segments. Despite extensive debugging, the helper routine could not be made pixel-perfect within our project timeline, so we reverted to circle‐based tank sprites. Rather than computing and rasterizing each rotated rectangle edge in real time, a more efficient future approach would be to precompute a small pixel-array “sprite” for each required tank orientation and cache these in memory. During initialization, the firmware could generate an array of bitmap frames at discrete angle increments—say every 5–10°—by rendering the vector outline once into an offscreen buffer. At runtime, the game logic then simply looks up the closest pre-rotated sprite and its pixel data directly into the VGA frame buffer. This sprite-caching strategy significantly reduces per-frame arithmetic (no repeated sine, cosine, or line-drawing calls) and eliminates the gaps we saw with on-the-fly vector routines. If memory permits, interpolated or higher-resolution angle arrays could smooth motion further; otherwise, a handful of coarse angles delivers a responsive, “vector-style” appearance with minimal CPU overhead.
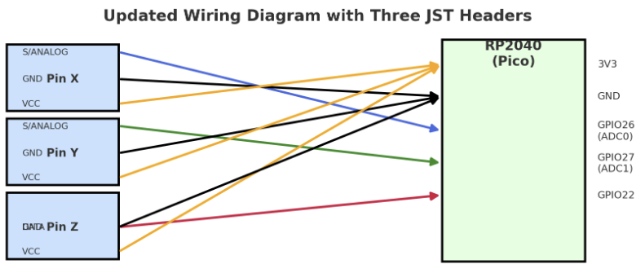
The RP2040’s constraint of only three accessible 12-bit ADC channels forced a key design decision: each joystick’s two potentiometers could not both be read simultaneously. To work around this, we dedicated the analog X-axis to tank rotation and re‐purposed the vertical axis motion control to a simple push-button “forward/back” input. While functional, this diverges from the original fluid dual‐axis control scheme we envisioned. Integrating an 8-to-3 analog‐multiplexing converter would allow all joystick axes to be sampled as true analog inputs in future designs, restoring the intuitive multi-directional control without sacrificing RP2040 I/O simplicity.
Our custom 3D-printed controllers successfully housed the joysticks and buttons, but because detailed CAD drawings were unavailable, some critical dimensions were estimated. As a result, assembly required iterative fitting and minor manual adjustments by Nikita, which modestly increased development time. Moreover, initial button placements proved too small for comfortable play; we remedied this by soldering larger tactile switches onto the breadboard. Moving forward, acquiring precise joystick datasheets or performing hands-on measurements before printing would streamline construction and ensure first-pass accuracy.
Finally, while our controllers are broadly usable, they remain optimized for larger hand sizes. To enhance long-term comfort and universal playability, we recommend conducting at least two or three more rapid prototyping cycles: adjusting grip contours, button placement angles, and enclosure size based on user feedback. Incorporating soft-touch materials or modular faceplates could further improve the tactile experience, making the hardware as compelling as the on-screen gameplay.
This game's aim was to provide retro feel and general usability in an addictive and engaging manner. We strongly believe that we have accomplished this and made it so that it can be enjoyed by a diverse audience!